IE5 6000V TYZD ដ្រាយផ្ទាល់ល្បឿនទាបផ្ទុកម៉ូទ័រសមកាលកម្មមេដែកអចិន្ត្រៃយ៍

ការបញ្ជាក់ផលិតផល
| វ៉ុលដែលបានវាយតម្លៃ | 6000V |
| ជួរថាមពល | 200-1400kW |
| ល្បឿន | 0-300 rpm |
| ប្រេកង់ | ប្រេកង់អថេរ |
| ដំណាក់កាល | 3 |
| បង្គោល | ដោយការរចនាបច្ចេកទេស |
| ជួរស៊ុម | 630-1000 |
| ការម៉ោន | B3,B35,V1,V3..... |
| ថ្នាក់ឯកោ | H |
| ថ្នាក់ការពារ | IP55 |
| កាតព្វកិច្ចការងារ | S1 |
| ប្ដូរតាមបំណង | បាទ |
| វដ្តផលិតកម្ម | 30 ថ្ងៃ។ |
| ប្រភពដើម | ចិន |
លក្ខណៈផលិតផល
• ប្រសិទ្ធភាពខ្ពស់ និងកត្តាថាមពល។
• រំភើបមេដែកអចិន្ត្រៃយ៍ មិនត្រូវការចរន្តរំភើបទេ។
• ប្រតិបត្តិការសមកាលកម្ម មិនមានល្បឿនដំណើរការទេ។
• អាចត្រូវបានរចនាឡើងទៅជាកម្លាំងបង្វិលជុំចាប់ផ្តើមខ្ពស់ និងសមត្ថភាពផ្ទុកលើសទម្ងន់។
• សំលេងរំខានទាប ការកើនឡើងសីតុណ្ហភាព និងរំញ័រ។
• ប្រតិបត្តិការដែលអាចទុកចិត្តបាន។
• ជាមួយនឹងអាំងវឺតទ័រប្រេកង់សម្រាប់កម្មវិធីល្បឿនអថេរ។
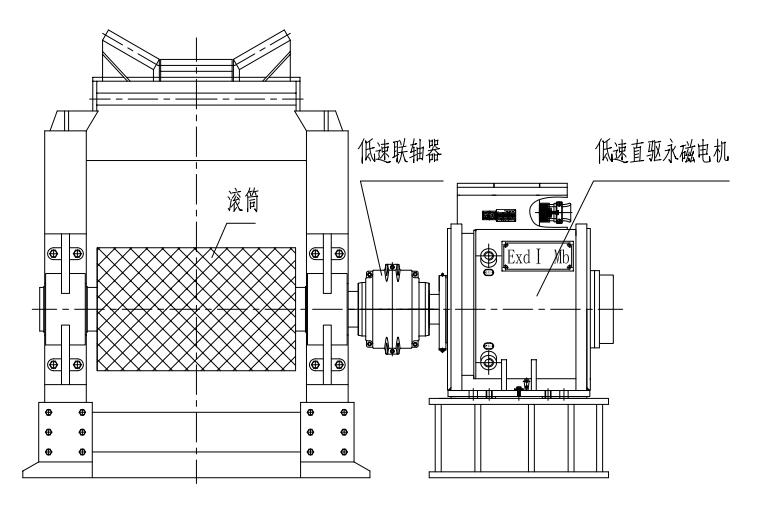
កម្មវិធីផលិតផល
ផលិតផលស៊េរីនេះត្រូវបានគេប្រើប្រាស់យ៉ាងទូលំទូលាយនៅក្នុងឧបករណ៍ផ្សេងៗដូចជា ម៉ាស៊ីនកិនបាល់ ម៉ាស៊ីនខ្សែក្រវាត់ ម៉ាស៊ីនលាយ ម៉ាស៊ីនបូមប្រេងដោយផ្ទាល់ ម៉ាស៊ីនបូមទឹក កង្ហារត្រជាក់ ស្ទូច ជាដើម នៅក្នុងអណ្តូងរ៉ែធ្យូងថ្ម អណ្តូងរ៉ែ លោហធាតុ ថាមពលអគ្គិសនី ឧស្សាហកម្មគីមី សម្ភារៈសំណង់ និងសហគ្រាសឧស្សាហកម្ម និងរ៉ែផ្សេងទៀត។


សំណួរគេសួរញឹកញាប់
ផ្ទៃខាងក្រោយអំពីម៉ូទ័រមេដែកអចិន្ត្រៃយ៍ បើកបរផ្ទាល់ល្បឿនទាប?
ដោយពឹងផ្អែកលើការអាប់ដេតនៃបច្ចេកវិទ្យា Inverter និងការអភិវឌ្ឍន៍សម្ភារៈមេដែកអចិន្ត្រៃយ៍ វាផ្តល់នូវមូលដ្ឋានសម្រាប់ការសម្រេចបាននូវម៉ូទ័រមេដែកអចិន្ត្រៃយ៍ដែលមានល្បឿនទាប។
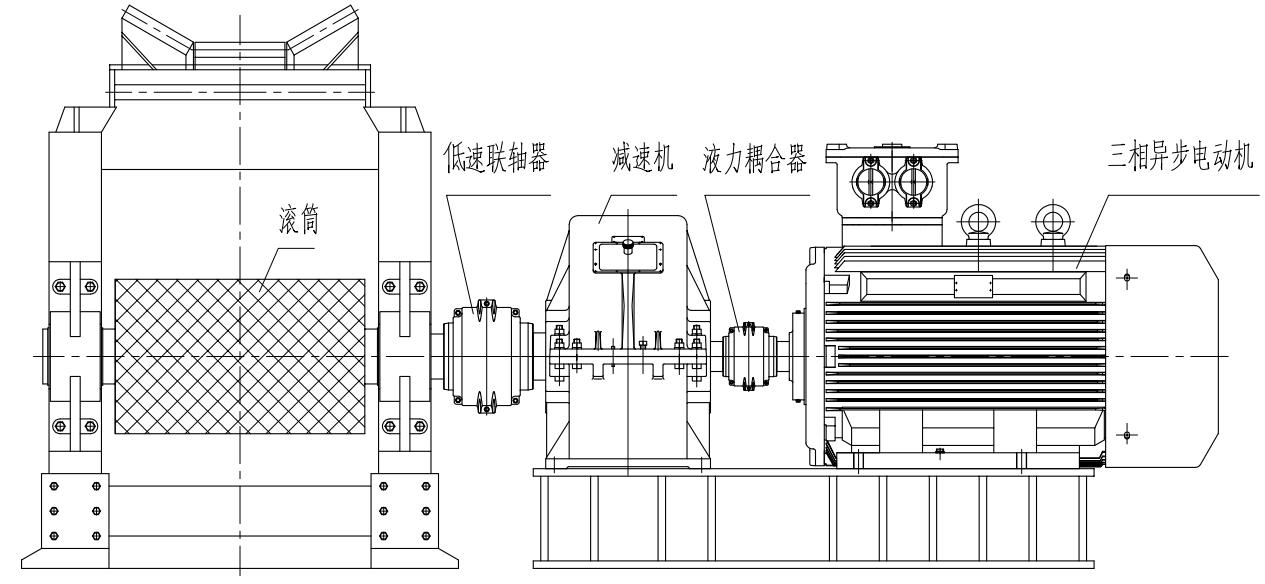
នៅក្នុងផលិតកម្មឧស្សាហកម្ម និងកសិកម្ម និងការគ្រប់គ្រងដោយស្វ័យប្រវត្តិ ជាញឹកញាប់ត្រូវប្រើការបើកបរក្នុងល្បឿនទាប មុនពេលដែលការប្រើប្រាស់ទូទៅនៃម៉ូទ័រអេឡិចត្រិច បូកនឹងឧបករណ៍កាត់បន្ថយ និងឧបករណ៍បន្ថយល្បឿនផ្សេងទៀតដើម្បីសម្រេចបាន។ ទោះបីជាប្រព័ន្ធនេះអាចសម្រេចបាននូវគោលបំណងនៃល្បឿនទាបក៏ដោយ។ ប៉ុន្តែក៏មានចំណុចខ្វះខាតជាច្រើនផងដែរ ដូចជារចនាសម្ព័ន្ធស្មុគស្មាញ ទំហំធំ សំលេងរំខាន និងប្រសិទ្ធភាពទាប។
គោលការណ៍នៃម៉ូទ័រសមកាលកម្មមេដែកអចិន្ត្រៃយ៍ និងវិធីសាស្ត្រចាប់ផ្តើម?
នៅពេលដែល stator បង្វិលល្បឿនវាលម៉ាញេទិកគឺល្បឿន synchronous ខណៈពេលដែល rotor សម្រាកនៅពេលចាប់ផ្តើមមានចលនាទាក់ទងគ្នារវាងវាលម៉ាញេទិកគម្លាតខ្យល់ និង rotor poles ហើយវាលម៉ាញេទិកគម្លាតខ្យល់កំពុងផ្លាស់ប្តូរ ដែលមិនអាចបង្កើតកម្លាំងបង្វិលអេឡិចត្រូម៉ាញេទិកសមកាលកម្មជាមធ្យមបាន ពោលគឺមិនមានកម្លាំងបង្វិលជុំចាប់ផ្តើមនៅក្នុងម៉ូទ័រដែលចាប់ផ្តើម synchronous របស់វានោះទេ។
ដើម្បីដោះស្រាយបញ្ហាចាប់ផ្តើម វិធីសាស្ត្រផ្សេងទៀតត្រូវតែយកមកប្រើជាទូទៅ៖
1, វិធីសាស្រ្តចាប់ផ្តើមការបំប្លែងប្រេកង់៖ ការប្រើប្រាស់ការផ្គត់ផ្គង់ថាមពលបំប្លែងប្រេកង់ដើម្បីធ្វើឱ្យប្រេកង់កើនឡើងបន្តិចម្តងៗពីសូន្យ ការបង្វិលវាលម៉ាញេទិកបង្វិល rotor បង្កើនល្បឿនធ្វើសមកាលកម្មយឺតរហូតដល់វាឈានដល់ល្បឿនកំណត់ ការចាប់ផ្តើមបានបញ្ចប់។
2, វិធីសាស្រ្តចាប់ផ្តើមអសមកាលៈ នៅក្នុង rotor ជាមួយនឹងការចាប់ផ្តើម winding រចនាសម្ព័ន្ធរបស់វាគឺដូចជា asynchronous machine cage winding ។ របុំ stator ម៉ូទ័រ synchronous ភ្ជាប់ទៅនឹងការផ្គត់ផ្គង់ថាមពលតាមរយៈតួនាទីនៃ winding ចាប់ផ្តើមបង្កើតកម្លាំងបង្វិលជុំចាប់ផ្តើមដូច្នេះម៉ូទ័រ synchronous ចាប់ផ្តើមដោយខ្លួនឯងនៅពេលដែលល្បឿនរហូតដល់ 95% នៃល្បឿន synchronous ឬដូច្នេះ rotor ត្រូវបានអូសទាញដោយស្វ័យប្រវត្តិទៅក្នុងសមកាលកម្ម។




